使用方法
clear
n=10;
for i = 1:n
for j = 1:n
A(i,j)=vpa(1/(i+j-1));
end
end
b=ones(n,1);
I=1000;w=0.5;
[x,t,it] = Iteration(A,b,I,eps)
norm(x)
[x,t,it] = GaussSeidel(A,b,I,eps)
norm(x)
[x,t,it,w] = SOR(A,b,I,eps,w)
norm(x)
|
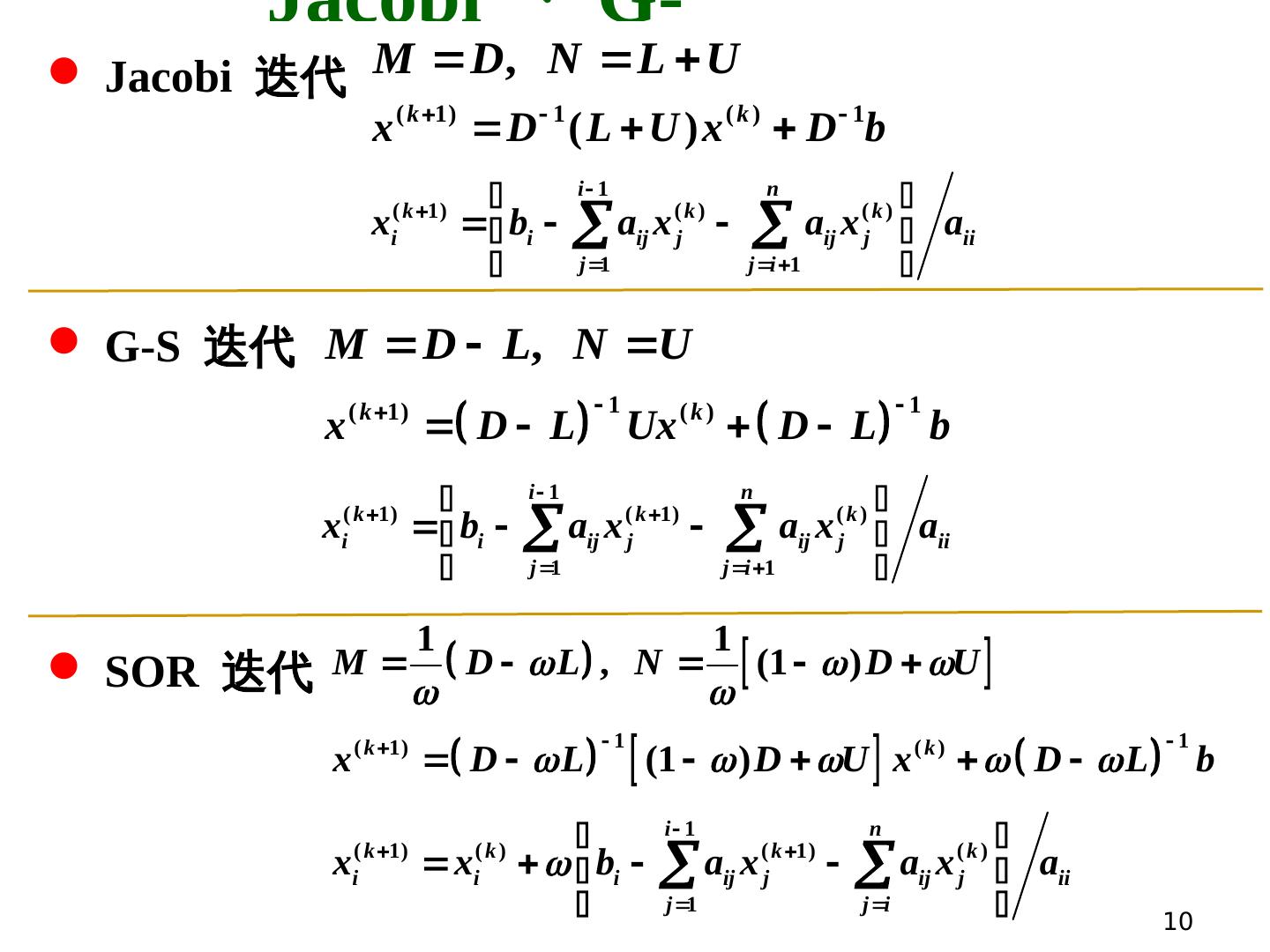
Jacobi迭代法
function [x,t,it] = Iteration(A,b,I,eps)
if nargin < 4
eps = 1e-6;
end
tic
[n,~] = size(A);
B = zeros(size(A));
x = zeros(n,1);
f = zeros(n,1);
for r = 1:n
for l = 1:n
if l == r
B(r,r) = 0;
else
B(r,l) = -A(r,l)/A(r,r);
end
end
f(r) = b(r)/A(r,r);
end
x_exact = A\b;
it = 1;
for k = 1:I-1
x = B*x+f;
if norm(x-x_exact)>eps
it = it+1;
end
end
t = toc;
end
|
Gauss-Seidel迭代法
function [x,t,it] = GaussSeidel(A,b,I,eps)
if nargin < 4
eps = 1e-6;
end
tic
[n,~] = size(A);
x = zeros(n,1);
D = diag(diag(A));
L = -tril(A,-1);
U = -triu(A,1);
G = (D-L)\U;
f = (D-L)\b;
x_exact = A\b;
it = 1;
for k = 1:I-1
x = G*x+f;
if norm(x_exact-x)>eps
it = it+1;
end
end
t = toc;
end
|
SOR迭代法
function [x,t,it,w] = SOR(A,b,I,eps,w)
tic
[n,~] = size(A);
x = zeros(n,1);
D = diag(diag(A));
L = -tril(A,-1);
U = -triu(A,1);
w_opt = 2/(1+sqrt(1-(max(abs(eig(D\(L+U))))))^2);
if nargin < 4
eps = 1e-6;
w = w_opt;
end
if nargin < 5
w = w_opt;
end
Lw = (D-w*L)\((1-w)*D+w*U);
f = w*((D-w*L)\b);
x_exact = A\b;
it = 1;
for k = 1:I-1
x = Lw*x+f;
if norm(x-x_exact)>eps
it = it+1;
end
end
t = toc;
end
|
注意:
实际应用中通常使用两次迭代解的差值作为收敛判断标准。
收敛速度:SOR(最佳w) > Gauss-Seidel > Jacobi